
Analisador de vibrações 12
Analisador de vibrações 12
O tema específico tratado em analisador de vibrações 12, consiste nas funções de dois canais no domínio do tempo num analisador de vibrações.
Quando se efetua análise de vibrações, para se tirar partido de todo o potencial de um analisador de vibrações, é necessário compreender o seu modo de funcionamento. Por isso, aqui são apresentados os conceitos de análise digital de sinal, implementados atualmente num analisador de vibrações FFT, do ponto de vista do utilizador.
Começa-se por apresentar as propriedades do Fast Fourier Transform (FFT) em que os Analisadores de Vibrações são baseados. Em seguida, mostra-se como essas propriedades FFT podem causar algumas características indesejáveis na análise do espectro, como aliasing e fugas (leakage). Tendo apresentado uma dificuldade potencial com o FFT, mostra-se quais soluções são usadas para tornar os analisadores de vibrações em ferramentas práticas. O desenvolvimento desse conhecimento básico das características do FFT torna simples obter bons resultados com um analisador de vibrações numa ampla gama de problemas de medição.
Aqui pode-se ver a gama de analisadores de vibrações disponibilizados pela D4VIB.
-
- Compreender a relação entre tempo e frequência num analisador de vibrações
- Amostragem e digitalização num analisador de vibrações
- O que é o Aliasing num analisador de vibrações
- A implementação do zoom num analisador de vibrações
- A implementação de janelas na forma de onda (windows) num analisador de vibrações
- As médias num analisador de vibrações
- Largura de banda em tempo real nos analisadores de vibrações
- Processamento em sobreposição (“overlap”)
- Seguimento de ordens
- Análise do envelope
- Função de transferência -funções de dois canais no domínio da frequência
- A Órbita – funções de dois canais no domínio do tempo
- Funções de um canal no domínio do tempo
- O Cepstro
- Unidades e escalas do espetro de frequência
12 Função de dois canais no domínio do tempo – Órbita
12.1. A monitorização de vibrações com proximitors em máquinas com chumaceiras de película de óleo
O sinal no tempo fornece informação importante e útil, mas como o veio se mova numa trajetória a duas dimensões, esta informação é limitada. Neste tipo de movimento, em chumaceiras de metal anti-frição, em que a pelicula de óleo amortece as vibrações na carcaça da chumaceira, o sinal no tempo, fornecido por um acelerómetro, não é o mais adequado. Para monitorizar este movimento, os sensores de deslocamento que medem a vibração relativa entre o veio e a carcaça, são mais adequados, sobretudo quendo instalados aos pares.
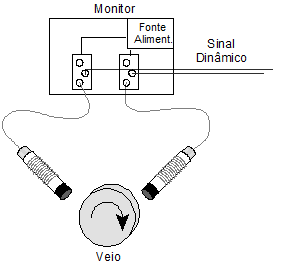
Analisador de vibrações 12 – Figura 12.1 Monitorização de vibrações com proximitors em máquinas com chumaceiras de película de óleo
Com dois sensores de deslocamento de vibração relativa (proximitors) existem condições para se conhecer o movimento do centro do veio nesse plano. Esta informação pode ser apresentada em dois sinais no tempo individuais, respetivamente a cada sensor, mas o ideal, é obter um gráfico que represente as duas dimensões do movimento do veio. Este gráfico designa-se por órbita. A órbita representa a trajetória do centro do veio no plano de leitura do par de sensores de proximidade. Os sensores são montados rigidamente na estrutura das máquinas, junto às zonas de apoio do veio (chumaceiras). Assim, a órbita representa a trajetória do centro do veio relativamente à estrutura da máquina. Devido à fácil interpretação e quantidade de informação que o gráfico contém, a órbita, conciliada com um indicador de fase, também conhecido por sensor de fase, é um gráfico eficaz para compreender os fenómenos físicos que ocorrem em máquinas rotativas.

Analisador de vibrações 12 – Figura 12.2 – Esquema de par de sensores de deslocamento (proximitors) montados numa chumaceira de película de óleo
12.2 Construção da Órbita no analisador de vibrações
A órbita combina os dados presentes nas formas de onda do par de sensores de proximidade, desfasado 90º, para criar um gráfico que exibe o movimento do centro do veio a duas dimensões. Na órbita da Figura 12.3 os sensores estão colocados a 0° e 90°.

Analisador de vibrações 12 – Figura 12.3 – Órbita resultante do par de sensores de deslocamento XY num analisador de vibrações
Na órbita, um ponto define-se por um par de valores X e Y, que se obtém através da informação contida nos sinais no tempo. O centro do gráfico é definido pela média de valores X e valores Y das duas formas de onda. Um impulso emitido pelo sensor de fase atua como referência: o ponto a negro mostra a localização do centro do veio quando este impulso ocorre. Para completar o gráfico, a localização dos sensores e o sentido de rotação do veio estão presentes na Figura 12.3. Note-se que o sentido de rotação do veio não pode ser determinado a partir da órbita sem informação adicional. A melhor maneira de determinar o sentido de rotação é examinando a máquina. Outra opção é utilizando órbitas em rotação lenta, as quais atuam no sentido do movimento de precessão. Assim, sabendo que a máquina está em rotação lenta, permite determinar o sentido de rotação observando o sentido de precessão. O sentido de precessão é determinado pela sequência espaço/ponto negro da órbita da Figura 12.3. O ponto de amplitude máxima dos sinais do tempo corresponde à distância mínima entre o sensor e a superfície do veio.
Na Figura 12.3 ilustra-se a progressão do centro do veio em volta da sua órbita desde o ponto 1 ao 5. O ponto 1 mostra a localização do centro do veio quando se dá o impulso do sensor de fase, isto é, quando o primeiro vértice do entalhe produzido no veio passa junto ao sensor sensor de fase. Os pontos 2 e 4 referem-se ao ponto mais distante e mais próximo ao sensor X (o pico mínimo e máximo no gráfico do sinal no tempo X). Do mesmo modo, os pontos 3 e 5 referem-se ao ponto mais distante e mais próximo ao sensor Y (o pico mínimo e máximo no gráfico do sinal no tempo Y).
Geralmente, representam-se vários ciclos de vibração no gráfico. Na Figura, representa-se um ciclo de vibração no gráfico do sinal no tempo, o que significa que a órbita também apresenta um ciclo. O pico positivo do sinal no tempo representa sempre a maior aproximação do veio ao sensor associado
12.3 Orientação de montagem dos sensores
As orientações de montagem dos sensores definem-se relativamente à direção de referência da máquina. O observador estará posicionado na direção axial do veio a partir da máquina acionante para a máquina movida. As localizações dos sensores são indicadas nas extremidades dos gráficos, o que fornece uma referência visual uniforme, independentemente da orientação de montagem dos sensores. Na Figura 12.4, a órbita está orientada de modo que, quem a observe, visualize como estando posicionado de acordo com a direção de referência, olhando ao longo do eixo da máquina.
A Figura 12.4 mostra dois exemplos de órbitas com orientações diferentes na montagem dos sensores. Em ambos os casos, a órbita é a mesma, apenas a orientação de montagem é diferente. Note-se que a indicação dos sensores nos gráficos representa a posição de montagem destes.

Analisador de vibrações 12 – Figura 12.4 – Posição dos sensores e respetivas visualizações
No lado direito da Figura 12.4, estão presentes órbitas equivalentes retiradas de um osciloscópio. Devido aos eixos X e Y do osciloscópio de baixo não corresponderem às posições dos sensores montados, o osciloscópio teria de ser rodado fisicamente 45°, contra o sentido dos ponteiros do relógio (como sucede na Figura), de forma a exibir a órbita com a orientação correta. Nesta orientação, os eixos horizontal e vertical do osciloscópio coincidem com as orientações dos sensores. Quando se observam órbitas num osciloscópio, os eixos X e Y deste, têm de corresponder obrigatoriamente às orientações de montagem dos sensores, ou a órbita exibida não corresponderá à realidade.
As órbitas filtradas não são construídas diretamente a partir da informação indicada pelo par de formas de onda. O sinal do tempo recolhido pelos sensores é filtrado a determinada frequência e posteriormente utilizado para a construção da órbita filtrada.
12.4 O referencial de fase e de velocidade de rotação no analisador de vibrações- Sensor de fase (keyphasor)
A sequência espaço/ponto da órbita representa o efeito do impulso do sensor de fase. Este impulso representa um acontecimento no tempo que ocorre uma vez por rotação do veio. O sinal provém de um sensor de proximidade particular que é colocado radialmente em posição axial diferente. O impulso do sensor de fase permite indicar a localização do centro do veio no instante em que, o entalhe produzido no veio para o efeito, passa por este sensor durante a rotação. A sequência espaço/ponto indica a direção de incremento de tempo.
A Figura12.5 exibe um veio em rotação. Durante o movimento de rotação, o centro do veio também se move (movimento de precessão) ao longo de uma trajetória que definirá a órbita. Quando o primeiro vértice do entalhe passa junto ao sensor de fase (posição 3 da Figura 12.5), o centro do veio coincide com o ponto sensor de fase da órbita.

Analisador de vibrações 12 – Figura 12.5 – Funcionamento do sensor de fase
No sinal no tempo, o período entre dois impulsos do sensor de fase representa uma rotação do veio. No gráfico da órbita, o veio move-se ao longo da trajetória entre dois pontos do sensor de fase, durante a rotação. O ponto do sensor de fase é adicionado ao gráfico cada vez que o veio completa uma rotação. Se o gráfico abranger informação de várias rotações, estará presente, nesse gráfico, o correspondente número de pontos sensor de fase. Em órbitas filtradas a nX a velocidade rotação, em que n se trata de um número inteiro, serão inseridos no gráfico sucessivos pontos sensor de fase, que se sobreporão uns aos outros. O ponto do sensor de fase adiciona informação que é útil para determinar o sentido instantâneo do movimento do veio e para estimar a fase absoluta, a frequência de vibração em ordens da velocidade de rotação e, por último, o modo de vibração do rotor.
12.5 Informação presente nas Órbitas num analisador de vibrações
A órbita, especialmente se dotada de sensor de fase, pode ser utilizada para medir a amplitude pico-a-pico em qualquer direção radial, a frequência relativa da vibração ou o sentido de precessão. O perfil da órbita pode fornecer pistas importantes sobre o comportamento das máquinas, realçar alterações na resposta que seriam impercetíveis tradicionalmente, e ajudar a identificar a localização onde o problema pode ocorrer relativamente à posição dos componentes da máquina. A órbita exibe o percurso do veio relativamente à posição média, não existindo informação acerca de qual a posição média do veio. Para obter a posição média do veio, existem outros tipos de gráficos.
Podem-se criar gráficos de órbitas a partir da mesma localização e a velocidades diferentes (dados transientes), para mostrar a evolução da vibração dos veios com o aumento da velocidade. Por outro lado, as órbitas podem ser criadas a partir de localizações axiais diferentes e à mesma velocidade, para exibir o modo de vibração do veio. A principal medição que se pode realizar numa órbita é a amplitude pico-a-pico (Figura 12.6). Existem dois aspetos fundamentais quando se utiliza esta medição. Primeiro, a medição pico-a-pico necessita de ser feita paralelamente ao eixo de medida do sensor. Medir simplesmente na vertical ou horizontal, neste caso, produziria resultados diferentes e incorretos. Segundo, a medição pico-a-pico é feita entre as tangentes que também são perpendiculares ao eixo de medida do sensor.

Analisador de vibrações 12 – Figura 12.6 – Medida da amplitude pico-a-pico da órbita
A órbita é utilizada para determinar o sentido de precessão do veio. O ponto do sensor de fase indica o sentido de incremento do tempo, sentido que será o de precessão do veio. Uma vez determinado, o sentido de precessão pode ser comparado ao sentido de rotação para confirmar se estamos perante precessão para a frente (sentido de rotação e precessão coincidentes) ou para trás (sentido de precessão contrário à rotação).
Em órbitas complexas, o veio pode ser submetido a precessão para a frente durante uma parte e precessão para trás durante o restante perfil da órbita. Note-se como os loops interiores das órbitas 1/2X a velocidade de rotação da Figura 12.7 mantêm precessão para a frente, enquanto os loops exteriores mostram precessão para trás.

Analisador de vibrações 12 – Figura 12.7 – Sentido de precessão das órbitas
A órbita filtrada pode ser utilizada para estimar a fase absoluta das duas componentes do sinal. Esta estimativa será mais precisa para órbitas circulares, e menos precisa para órbitas elípticas (Figura 12.8) devido ao movimento a velocidade angular constante da órbita circular ao longo da sua trajetória (intervalos de tempo iguais e ângulos semelhantes entre pontos). Nas órbitas elípticas, a velocidade angular da órbita não é constante (intervalos de tempo iguais, mas ângulos diferentes entre pontos). Como a fase é uma medida no tempo, estas variações na velocidade angular causam imprecisões quando se tenta estimar a fase a respeito de cada sensor.

Analisador de vibrações 12 – Figura 12.8 – Dificuldades na leitura de fase em órbitas
A Figura 12.9 ilustra um conjunto de órbitas 1X a velocidade de rotação em que os pontos do sensor de fase indicam a localização do centro do veio, em cada plano de medida, no instante em que ocorre o impulso. Estes pontos podem ser ligados entre si por uma linha, de modo a obter uma estimativa do que será o comportamento do veio ao longo do seu comprimento. O movimento do veio ocorre a ritmos distintos nas diferentes partes da órbita. Sem indicações adicionais, não se conhece a localização do veio a determinado instante. O impulso do sensor de fase é a solução, fornecendo a referência no tempo para um ponto, em particular, em cada órbita.

Analisador de vibrações 12 – Figura 12.9 – Em cada órbita, o impulso do sensor de fase exibe a localização desse ponto do veio
12.5 Apresentação da Órbita associada às formas de onda do sinal no tempo num analisador de vibrações
Este tipo de gráfico combina a órbita com duas formas de onda do sinal no tempo. A forma de onda resultante da leitura Y é exibida por cima da X, ambas à direita da órbita (Figura 12.10). O gráfico contém informação sobre o sentido de rotação, a velocidade, a escala utilizada na órbita e a escala de tempo presente nas formas de onda. A figura é um exemplo de como utilizar estes gráficos para localizar um defeito na superfície do veio. Esta órbita possui um perfil que revela a existência de dano na superfície do veio. Normalmente, os defeitos de superfície traduzem-se por picos que apontam na direção dos sensores. As formas de onda ajudam a esclarecer o período entre estes picos e tornam possível determinar a localização angular do dano na superfície.

Analisador de vibrações 12 – Figura 12.10 – Órbita associada às formas de onda Y e X
Recorde-se que os picos positivos da forma de onda representam a passagem do veio junto ao sensor e que, a localização de montagem dos sensores, é exibida no gráfico da órbita. O impulso do sensor de fase representa o mesmo instante em todos os gráficos. Esta combinação de gráficos permite correlacionar a informação presente na órbita com a informação das formas de onda.
Para ver uma apresentação sobre este tema clique aqui.










2 Comments
Comments are closed.